When doing LiDAR surveys our system operators plan and adjust a wide range of settings. From a client’s point of view though there is only four parameters that are relevant to consider:
- Point Density
- Field-of-View
- Flightline Overlap
- Altitude above ground
The sensor will then be configured to make sure that these four LiDAR parameters fulfil their set requirements while acquiring the data in a most efficient way.
Point Density
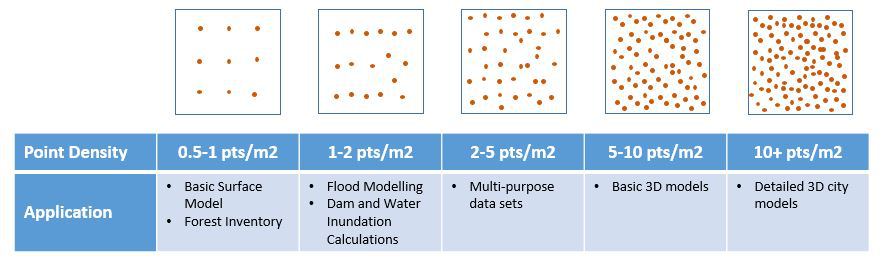
The point density defines in the end how a client wants the point cloud to look like. Depending on the final application, points can be sparsely distributed (low point density) or need to be located closer to each other (higher point density). While a denser point cloud normally allows to see more detailed structures in the data it also comes at a much higher price tag. It is therefore commendable to consider the intended use of the data before defining the targeted point density. Below some common point densities used and their applications:
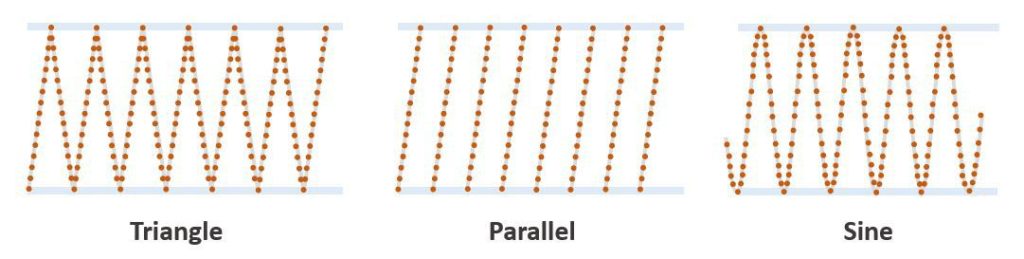
It is also worth pointing out that the LiDAR sensor used will have an impact on how the point cloud looks like. Different sensors have different scan pattern which can result in a variation of point density in the data. At the same time movements of the aircraft will result in compressing or stretching of scan lines which leads to local variations.
Field-of-View
The field-of-view (FOV) is defined as the angle which is covered by a sensor. For LiDAR applications this is equal to the angle in which LiDAR signals are emitted. For some LiDAR sensor the amount of LiDAR signals emitted per scan cycle (going back and forth) is always the same. In such cases reducing the angle will result in a denser point pattern while increasing the FOV is going to spread the LiDAR returns farther apart.
If a camera is used in conjunction with the LiDAR sensor, it is common practice to choose the FOV so that LiDAR returns will match the area covered by aerial images.
Other factors like objects on the ground or surface properties can require to adjust the FOV accordingly. A dense forest canopy for instance can call for a wider field of view to obtain some ground returns. At the same time cities with high buildings and narrow streets might benefit from a narrower angle to get returns from street level.
Flightline Overlap
In contrary to aerial photography LiDAR does not need a stereo overlap to determine the three-dimensional position of a point. Nevertheless a certain overlap (also called sidelap) between strips is applied during flightplanning to ensure a complete coverage of the final LiDAR data set. The main reason for this precaution is to account for the different factors which can affect the coverage on the ground. Some examples are:
- Roll movements of the aircraft: will shift the swath across the flying direction
- Crosswinds: cause the aircraft to fly slightly sidewards (crabbing) which narrows the swath
- Changes in altitude above ground: directly affect the swath width
- Variation in terrain elevation: converts to change of altitude above ground and therefore affect the swath width as well
On the ground, commonly the width of the overlapping areas is between 300-400m. Using a 40 degree FOV this would represent roughly 21-27% of the swath when flying from 2000m but already 42-55% when flying at an altitude of 1000m above ground level.
A general rule is to apply at least 30% overlap when collecting data with a helicopter (normally at lower altitudes and lower speed) and around 20% when using a fixed-wing aircraft from higher altitudes.
Altitude above ground
The flying altitude at which LiDAR data is collected is probably the most important factor affecting the amount of work required. Flying at higher altitude results in a wider swath and thus allows to cover more area in the same amount of time.
While this might be the crucial parameter of the four it is commonly not set by the customer, but more defined through the three other LiDAR parameters. Using the values chosen for point density, field-of-view and sidelap the capabilities of the used LiDAR sensor will then define the altitude above ground for collecting the data set.
Summary
In order to plan a LiDAR mission four parameters need to be defined: point density, field-of-view, sidelap and altitude above ground. These LiDAR parameters are all interlinked with each other and influence the efficiency at which a project can be completed. Reducing the amount of flying required translates directly into saving costs. Picking the right values for these parameters is therefore crucial to provide clients the most cost-efficient solutions.