The most prominent attribute of a point cloud is definitely it’s point density. Similar to the resolution of an aerial photograph, the point density of LiDAR data defines the amount of measurements per area at which the surface of the earth is sampled. As we are talking about 1-dimensional points and not 2-dimensional pixel objects there will be empty space between measurements. Consequently it is also common to talk about the distance from point to point – the so called point spacing.
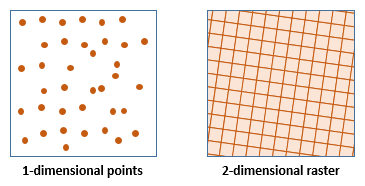
In its simplest definition, point density describes the number of points in a given area. Commonly the point density is given for one square meter and therefore uses the unit pts/m². Point spacing on the other hand is defined as the distance between two adjacent points.
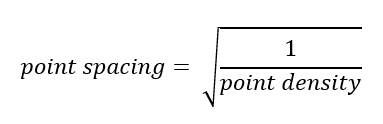
Assuming a regularly distributed point cloud the point spacing is the square root of the average area per point (the area of the polygon divided by the number of points it contains). In context to the point density the following formulas apply:
Nominal vs Actual Point Density
As always, there will be a lot of factor influencing the actual point density of the final LiDAR dataset. When planning a survey mission it is therefore generally referred to the Nominal Point Density (NPD) or respectively to the Nominal Point Spacing (NPS).
When evaluating the NPD, it is always important to have a common understanding about which group of points to include in the assessment. The United States Geological Survey has published their highly detailed standards regarding LiDAR surveys. Many projects refer to this document when specifying the point density requirements as it details exactly how to interpret the point density of a dataset.
Among other things, the document defines that only last-returns shall be considered when evaluating the point density of a dataset. Using only one return per emitted signal allows to verify that the laser scanning system performed as required by the project specifications. Including all returns of an emitted beam obviously increases the observed point density in areas where multiple returns occur.
Another factor that affects the distribution of points is the scanning pattern created by different sensors. Looking at the three sample patterns below one can clearly see that especially the Triangle and Sine pattern will have higher point densities at the edges of the swath than in the center.
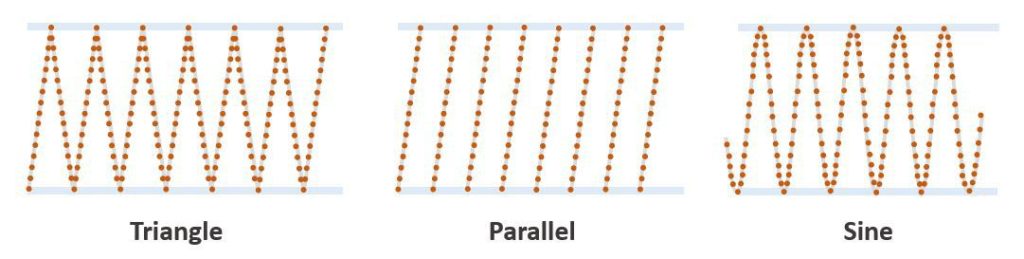
As a result, the same USGS document specifies to only use what they call the usable part (typically the center 95 percent) of a swath for evaluating the point density of a LiDAR data set.
LiDAR Base Specifications by the U.S. Geological Survey
This document published by the USGS is frequently referred to when talking about LiDAR. The specifications mentioned within cover everything from definitions, data collection to data processing for the final deliverables.
Download the LiDAR Base Specifictions from the USGS website
Aggregating Point Clouds
One major advantage of LiDAR data compared to aerial photographs is that different datasets can be merged into a unified point cloud. By combining multiple layers of points the point density within an area will increase accordingly. Such layers can come from multiple passes over the project area, flying with an overlap of over 50% as well as multiple channels or multiple sensors on a single collection platform.
Common Point Densities
Knowing about the nominal definition of point density, the obvious next question is: where do I need which point density? The point density requirement of a project will be a major factor contributing to the overall cost of a LiDAR project. While there might be various considerations for picking a certain point density, the level of detail that needs to be visible in the data set will be at least limiting the minimum point density. A higher point density will have a lower point spacing and therefore reveal more features in the point cloud than sparse data.
Below a few common point densities and how they are being used. Bear in mind that technologies are evolving fast and even today a trend towards denser point clouds can be observed in many of these applications.
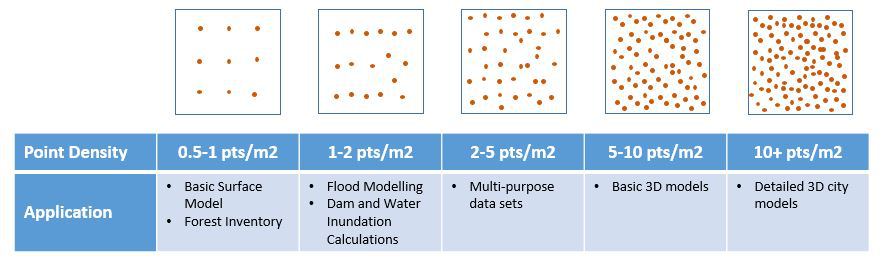
Sparse point clouds (0.5-1 pts/m²)
Point clouds with such low point densities are normally collected for large scale digital height models. Subsets of these point clouds (either based on return number or classification) are used to create surface layers like the digital terrain model (DTM), digital surface model (DSM), normalized height model or the canopy height model used in forestry applications.
Low density point clouds (1-2 pts/m²)
At this point density the point spacing constitutes between 0.7 and 1m. This can be enough for flood modelling applications where even river and streams can be detected under forest canopies.
Medium density point clouds (2-5 pts/m²)
Very often a compromise between point density and cost of acquisition, these data sets are suitable for satisfying most usages. They might not be dense enough for 3D building modelling but can certainly be used to be post-processed and analyzed to derive new products.
High density point clouds (5-10 pts/m²)
3D city modelling is one of the examples where a high point density will be required in order to capture the details of buildings. 5-10 pts/m² can be enough in order to capture the basic shapes of a building.
Extremely dense point clouds (10+ pts/m²)
Do you want to have a more detailed of your buildings? In that case you will certainly need a higher point density to capture all the details. For extremely high point densities it might also be worth to look at other technologies to be used instead of airborne LiDAR scanning or then maybe as an additional data source.
Further Reading: This article by Martin Isenburg of Rapidlasso looks at the point density of datasets from two different laser scanner. A good example on how to use lastools to assess the point density and point spacing of your LiDAR data: Density and Spacing of LiDAR
This article is really useful for me. Thanks a lot! However, I have some questions. When we comse to common point densities, who decide the density vs. application? I was just wondering from what source, you can categorize them. I’ve tried find how they are categorized that way, but I couldn’t. please let me know about that. Thanks in advance.
Hi Sue, normally the requirements for point densities are given by the end customer depending on his project needs. The overview in the article is based on what I have seen when answering tenders for airborne surveys.
Since the time I wrote this article the trend has been towards denser point clouds, but I would still consider them as a good rough guidance. Usually there is a trade-off between density and cost of acquisition that carefully needs to be considered.
Hi, Mr. Rohrbach. Thank you for the really useful information! I have a question regarding the point cloud density.
When the Point Cloud is in 3D, how does the point cloud density calculated?
Would it be calculated for each z-layer or would it be calculated for the whole z space for a certain x-y area?
I can’t seem to find any information regarding calculation of point density and your post is the one that is closest to what I want to find out.
Once again thank you for this post and looking forward to hearing from you.
The definition of point cloud density can very between projects. Commonly though the point density is computed based on a specified x/y extend. This can be either grid-based (e.g. for raster cells of 10m x 10m) or then by defining a circular coverage (e.g. circle with 5m radius). All points across any z-extend are then counted towards the density for given extend.