
The fundamental basics of airborne LiDAR scanning are fairly simple. As explained in my introduction post about LiDAR technology, it is not much more than emitting a beam of light towards a target and measuring the time it takes to return back to the sensor.
Looking a bit closer at this technology we can see though how the laws of physics start to introduce limitations on how LiDAR can be used. One of these limitations is a so called “range gate” which I will try to explain in this post.
Introduction to range gate
The term “range gate” essentially describes the distances that can be measured by a certain LiDAR sensor. The minimum limitation can come from either sensor specifications or is then limited for safety reasons (e.g. eye safety). On the far end though, the range gate is restricted by the characteristics of the emitted signal. More precisely it is the association of the emitted pulse with the returning pulse which becomes more challenging with higher pulse rates.
Calculating the maximum range of a single pulse
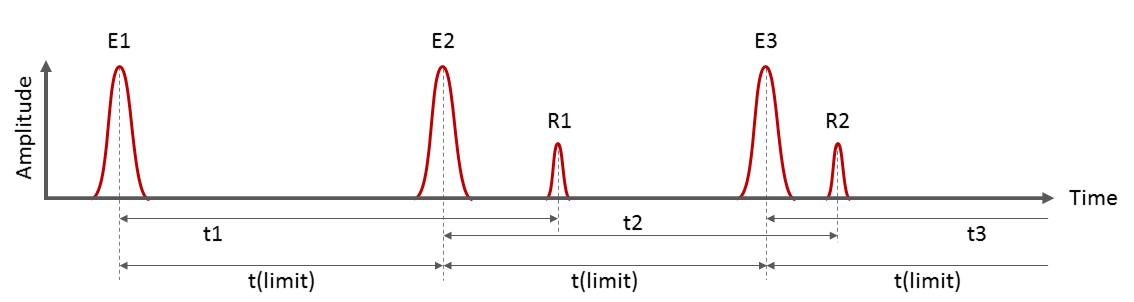
The emitted signal of a LiDAR sensor travels at the speed of light. As a result the distance d between sensor and target can be calculated by d = c * t/2, whereas t represents the time between emitting the signal (E) and receiving the signal (R). The time is divided in half as the light has to travel the distance in both directions.
Applying this on a timeline would look as following:
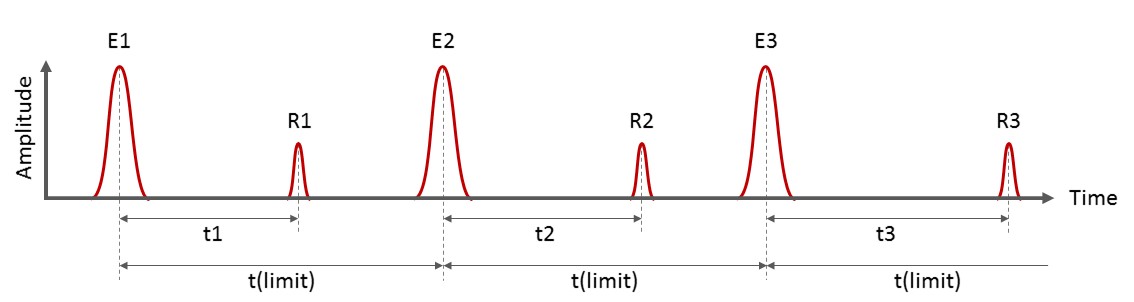
(In reality further factors – like e.g. processing of the signal and internal electronics – will reduce the time limit even further. The resulting shortening of the measurement range can be as much as 400-500m on older equipment. As this is though highly system-specific I’m going to disregard this for the scope of this article)
Second-time-around, third-time-around … multiple-time-around
If the time of flight exceeds the pulse repetition interval the emitted signal will get associated with the received signal from the previous emission.
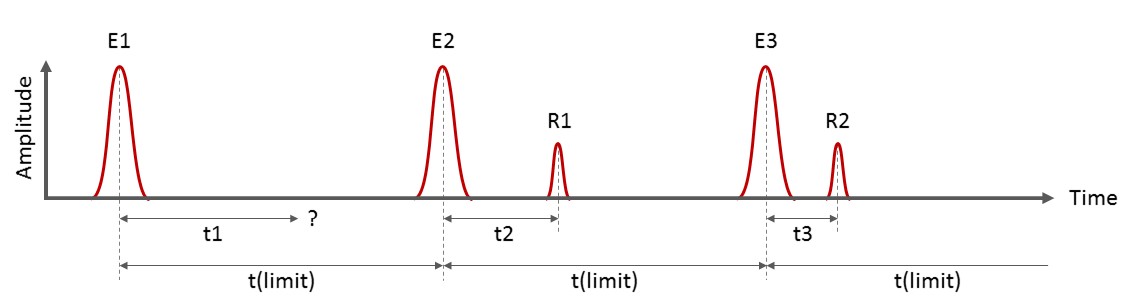
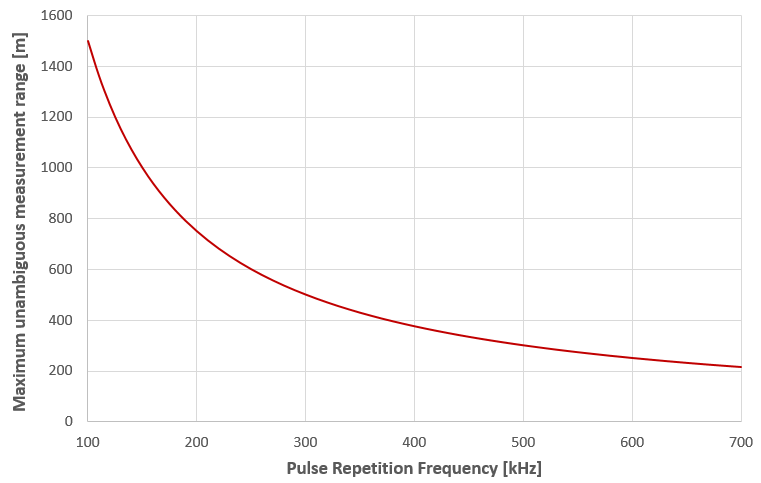
We are all looking for denser point clouds. The most obvious approach to achieve that is to send out LiDAR pulses more frequently. Unfortunately as we can see from the formulas mentioned before this will directly affect the maximum unambiguous measurement range.
Sending coded LiDAR pulses
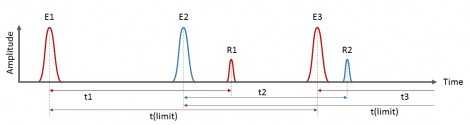
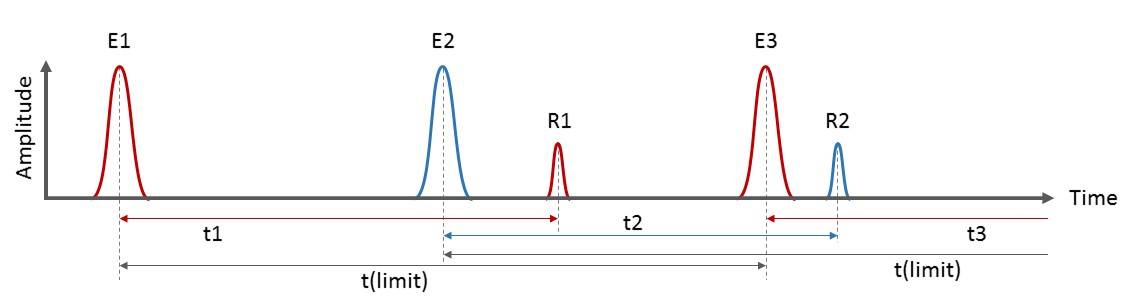
The problem of unambiguous return signal comes mainly from the fact that all signals are equal. Introducing an extra method (e.g. coding) of distinguishing between emitted signals allows to have multiple pulses travelling in the air. By doing so it is no longer the pulse repetition frequency but more the repetition frequency of a certain (coded) pulse type that limits the measurement range.
Having for example two different types of emitted signals would half the pulse repetition frequency and therefore double the maximum unambiguous measurement range. The resulting formula can be described as d(max) = m * c / PRF, whereas m is the number of different signal types.
Within the past years manufacturers have started to use prisms to split the emitted laser beam into two individual signals. This way the pulse repetition frequency can be maintained while doubling the amount of returns collected.
However, splitting the laser beam also lowers the pulse’s power. For applications where successful collection of returns depends on the power of a LiDAR signal (e.g. forestry penetration) this methodology could potentially impact the quality of the resulting point cloud.
Adding additional signal emitters
Another way of increasing the pulse density without changing the pulse repetition frequency is by duplicating the sensor electronics. Adding another emitting/receiving unit will subsequently also double the amount of signals.
In order to further spatially decouple these multiple scanning components they can be installed at an angle to each other. Additionally these separate signals can also have different wavelengths which allows to detect different features of the surveyed target.
Deal with multiple-time-around echoes during post-processing
The problem of ambiguity comes from the fact that we are measuring an unknown distance. The measured object can therefore be at the distance retrieved from any of the multiple-time-around echoes. Introducing some restricting apriori knowledge to the survey project will eliminate many of these signals as a valid return. This can either be done by specifying in which time window the return signal is expected (MTA zone) or by supplying a rough surface model which can then be used to determine the echo to be used for processing.
Summary
There is many ways how LiDAR sensor manufacturer are handling the physical limitations of echo ambiguity. All have their advantages and disadvantages which I tried to summarize in the table below.
| Method | Advantages | Disadvantages |
|---|---|---|
| Coding pulses | Reduces the pulse repetition frequency and therefore increases the measurement range. | Decoding pulses needs extra processing. |
| Splitting signals | Doubles the amount of pulses emitted while maintaining the pulse repetition frequency. | Emitted pulses have reduced power and might therefore result in weaker returns. |
| Adding additional signal emitters | Increased amount of pulses (potentially even delivering additional attributes of the target). | More sensors results in higher hardware cost. Point pattern depends on configuration between emitters. Additional complexity. |
| Post processing | Tuning of parameters possible during processing | Apriori knowledge of survey area (terrain) needed |
Did I miss something in this article or do you have something to add – let me know in the comments below…