
LiDAR is a survey technology which allows to measure points in the 3-dimensional space. Thanks to its flexibility in application it has gained a large popularity and is today used in a range of fields. For aerial surveys we use LiDAR sensors mounted on an airborne platform (plane or helicopter), but the same technology can also be found in other applications.
How does LiDAR work?
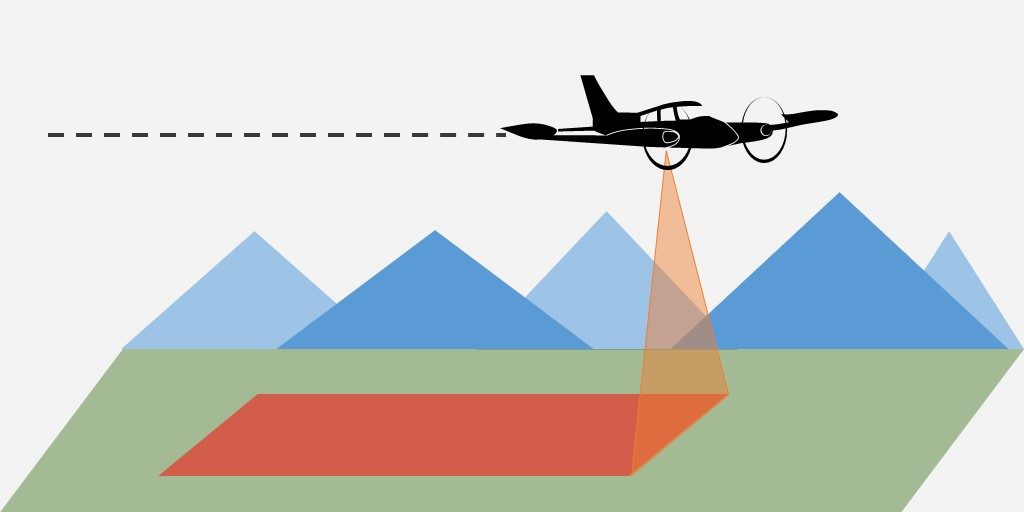
A LiDAR sensor emits a pulse of light towards the target which are then reflected from the surface and returned towards the sensor. The received detects the incoming signal and calculates the distance the light has traveled. Using the position of the sensor, the direction in which the light was sent and the distance calculated it is then possible to derive the 3D position where the signal was returned.
Because LiDAR is generating its own signal pulse it does not depend on any illumination from other sources (like for example the sun). As long as there is nothing interfering between sensor and surface it is therefore possible to collect data below cloud cover or even during the night.
Basic components of a LiDAR measurement
As mentioned in the introduction, three components need to be known in order for a successful measurement:
- Position – Where is the sensor?
- Direction – In which direction was the signal sent?
- Distance – How far was the distance measured?
Several technologies are involved in each of these components and the quality of the final measurement will only be as good as the accuracy of the observations used as input.
Position
The exact position of the sensor is determined with help of a GNSS (Global Navigation Satellite System) receiver. The receiver is mounted either on top of the aircraft’s fuselage (fixed-wing) or on top of the tail extension (helicopter). To improve the accuracy of the measurements additional reference data like precise satellite tracks (Precise Point Positioning) or well-surveyed ground stations (differential GNSS) are incorporate when calculating the kinematic trajectory of the sensor. In a later processing step, this trajectory allows to extract the position of the aircraft at any given time during the survey flight.
In order to derive the position of the LiDAR source (instead of the position of the GNSS receiver) an offset is applied to the measurements. This distance between LiDAR and GNSS receiver – known as GNSS leverarm – is determined after installation of the sensor to the aircraft. Assuming that there are no major force impacts on the aircraft and sensor this leverarm should stay the same throughout the survey project.
Direction
Built in to the LiDAR sensor an inertial measurement unit (IMU) tracks the movement of the aircraft around its three main axes. The measured angles are commonly known as pitch, roll and yaw. The sensor itself is typically mounted directly to the fuselage of the aircraft and therefore follows its movements. Inside the LiDAR device a mirror is responsible for deflecting the generated light pulse towards the target. Each time a light pulse is emitted the orientation of said mirror is stored for later use. The combination of both the orientation of the aircraft and the deflection angle created by the mirror then allow for computing the direction in which the signal was sent.
Distance
Using the measured time t (between emitting and receiving the signal) and the known speed of light c, the distance d between sensor and target can be calculated using the following formula: d = c * t / 2.
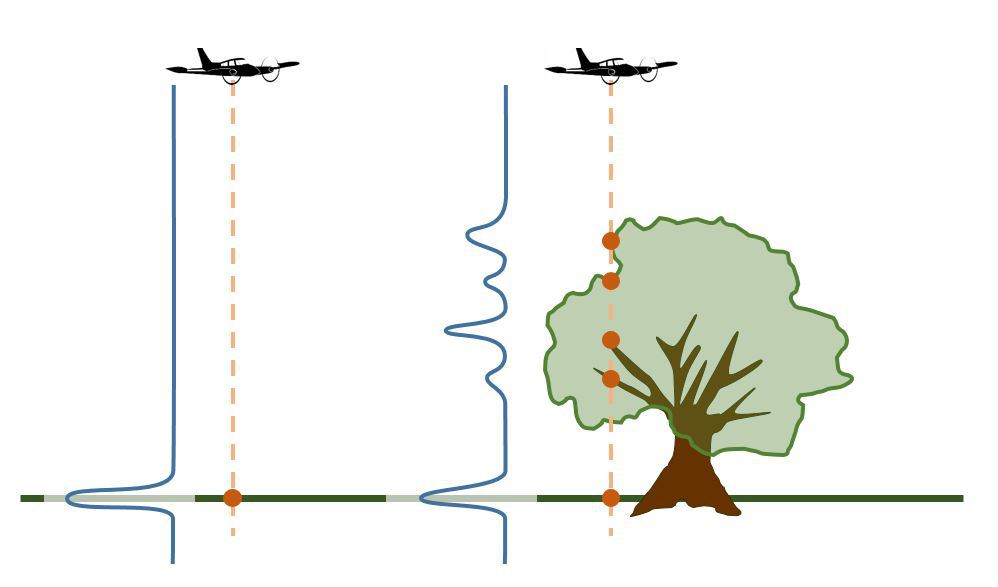
After emitting the signal pulse the photons spread in the shape of a cone where the highest energy can be found along the centerline. The farther they travel the larger the area becomes which is covered with these photons. It is here important to understand that a LiDAR signal is not measuring a single point on the ground but more an area which gets illuminated by the sent photons. Depending on what objects are contained within this area, the photos might get returned at the same distance (well defined surface) or some might get reflected before others (complex objects like trees). As a result photons returned to the receiver will generally arrive spread over time, which converts into a range of distance measurements.
By plotting the amount received photons (or their combined energy) against the measured distance we get a waveform of the returned signal. LiDAR sensors either store the whole waveform for each signal (which allows further analysis) or extract only the distances where the highest energy was returned (which saves storage space). Multiple returns are stored as separate points and the number of return (first, intermediate or last) is saved as metadata.
Summary
Within this first introduction we looked at the three main components of a LiDAR measurement: position, direction and distance. Each of these components involves the use of several technologies and high-precise instruments. The quality and accuracy of the measurements of these sensors will highly affect the end result. It is therefore crucial that all operations are conducted under high diligence.